3D 輪廓量測技術深解
演算法如何自動過濾雜訊,抓出關鍵的「第一層針尖」?
在高密度懸臂式探針卡(Cantilever Probe Card)的檢測現場,工程師往往面臨一個兩難:用工具顯微鏡看太慢,且容易有盲點;導入 3D 掃描後,卻又因為資料量太龐大、層數太複雜,導致判讀困難。
硬體掃描取得 3D 點雲只是第一步,真正的決勝點在於「軟體如何處理這些資料」。若無法有效過濾雜訊並精準分層,再精密的數據也只是一堆無法決策的雜訊。本文將以 Solarius 整合平台為例,解析從 Pin Map 匯入到演算法自動分層的完整技術路徑,揭開「資料結構化」如何成為製程良率的關鍵推手。
一、拒絕人工教讀:Pin Map 驅動的自動化座標整合
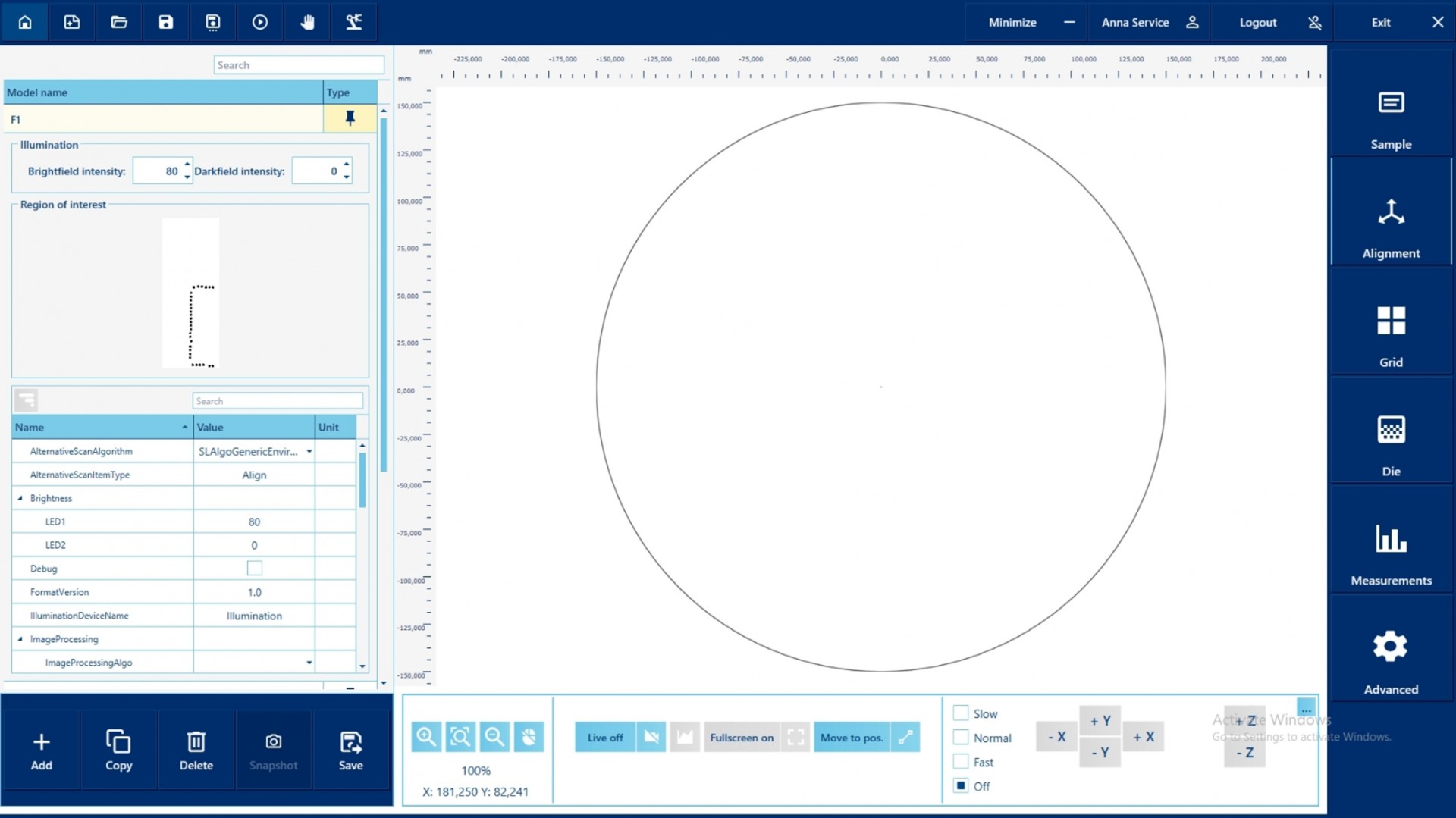
現今自動化量測最耗時的環節在於「人工教讀(Teaching)」,但在數千根針尖的高密度架構下,這已不切實際。現代化的量測流程,起點必須是 Pin Map 。
Pin Map
1. 座標數位化,而非目視化:匯入 Pin Map 的核心價值,在於將量測目標從「憑經驗找點」轉化為「精確的座標集合」。這不僅大幅降低建立 Recipe(量測程式)的時間成本,更消除了人為操作的變異與失誤。
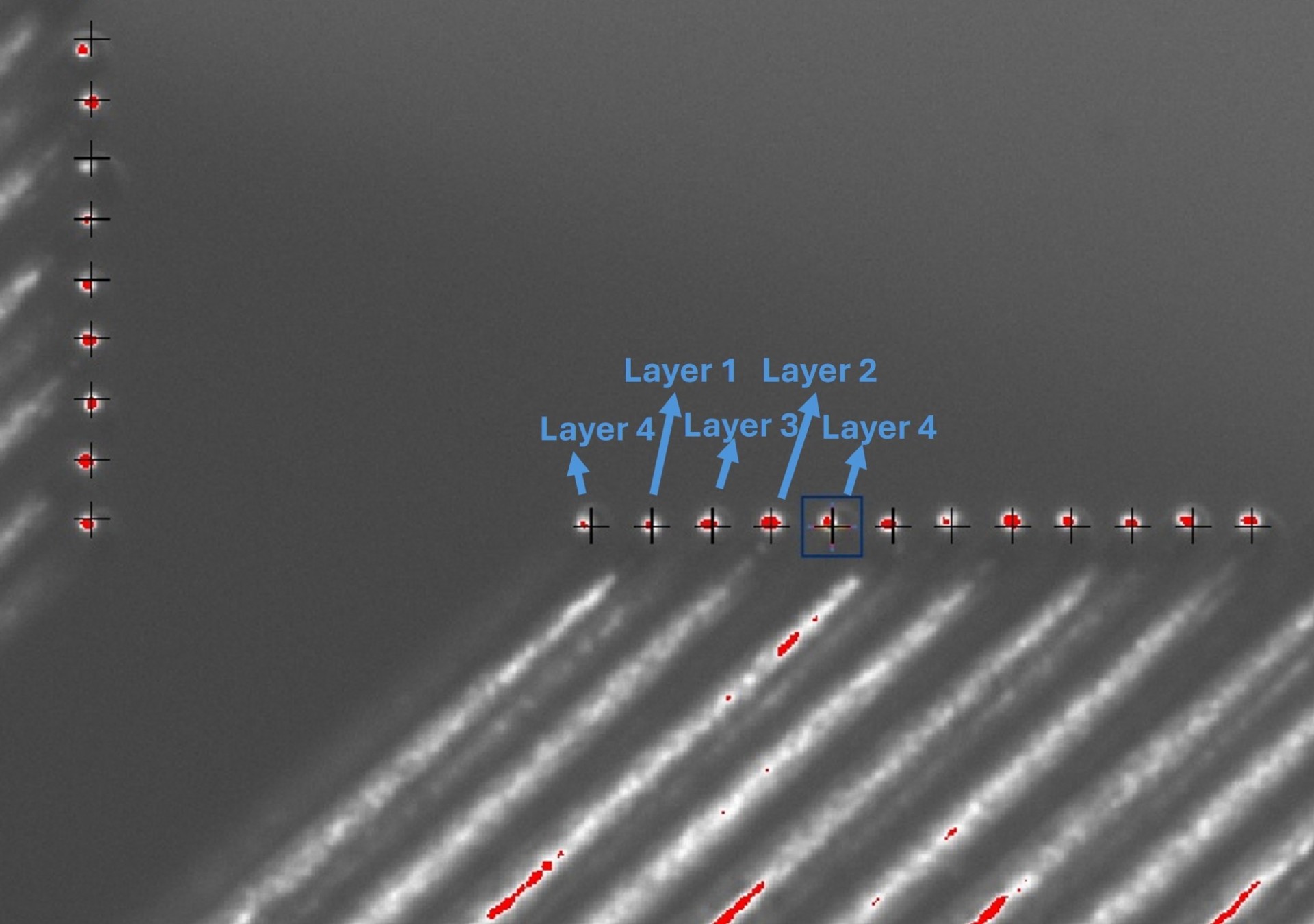
2. 視覺化確認與座標對應:在軟體介面中,系統會將 Pin Map 的理論座標以十字標記疊合在相機影像上。這是一個關鍵的「視覺化檢查點」,工程師能一鍵確認資料是否載入正確,並將設計座標與機台機械座標進行初步綁定。
二、精準對位(Alignment):用「高度」取代「影像」
探針卡放置在載台後,必定存在平移與旋轉誤差。傳統依賴影像紋理(Pattern Matching)的對位方式,容易受金屬反光或背景干擾影響。
在進階的 3D 量測流程中,我們採用 「高度特徵對位」:
• 系統先掃描指定區域,取得高度資訊。
• 將高度資料進行二值化(Binary)處理,形成清晰、不受光線影響的特徵點。
• 透過比對這些特徵,系統能同時精確補償平移與旋轉誤差,確保 Pin Map 準確指向每一根目標針尖,為後續掃描打下完美基礎。
三、演算法的核心魔法:自動分層與雜訊過濾
掃描完成後,原始的 3D 輪廓資料本質上是一個複雜的「高度分佈場」。在高密度多層結構中,不同層的懸臂與針尖訊號往往混雜在一起,甚至出現結構遮蔽。這就是軟體演算法發揮價值的主戰場。
1. 資料結構化:從「點」到「物件」
演算法的第一步是將原始的高度數據轉化為具有工程意義的「物件集合」(Object Collection)。系統不再只看「這個座標的高度是多少」,而是識別出「這是一個針尖」或「這是一根懸臂」。
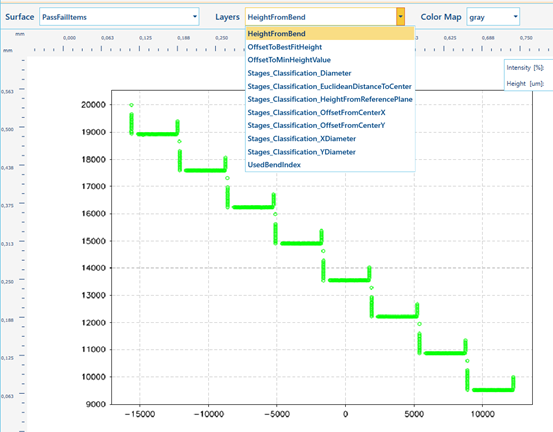
2. 自動高度分層(Auto-Layering)
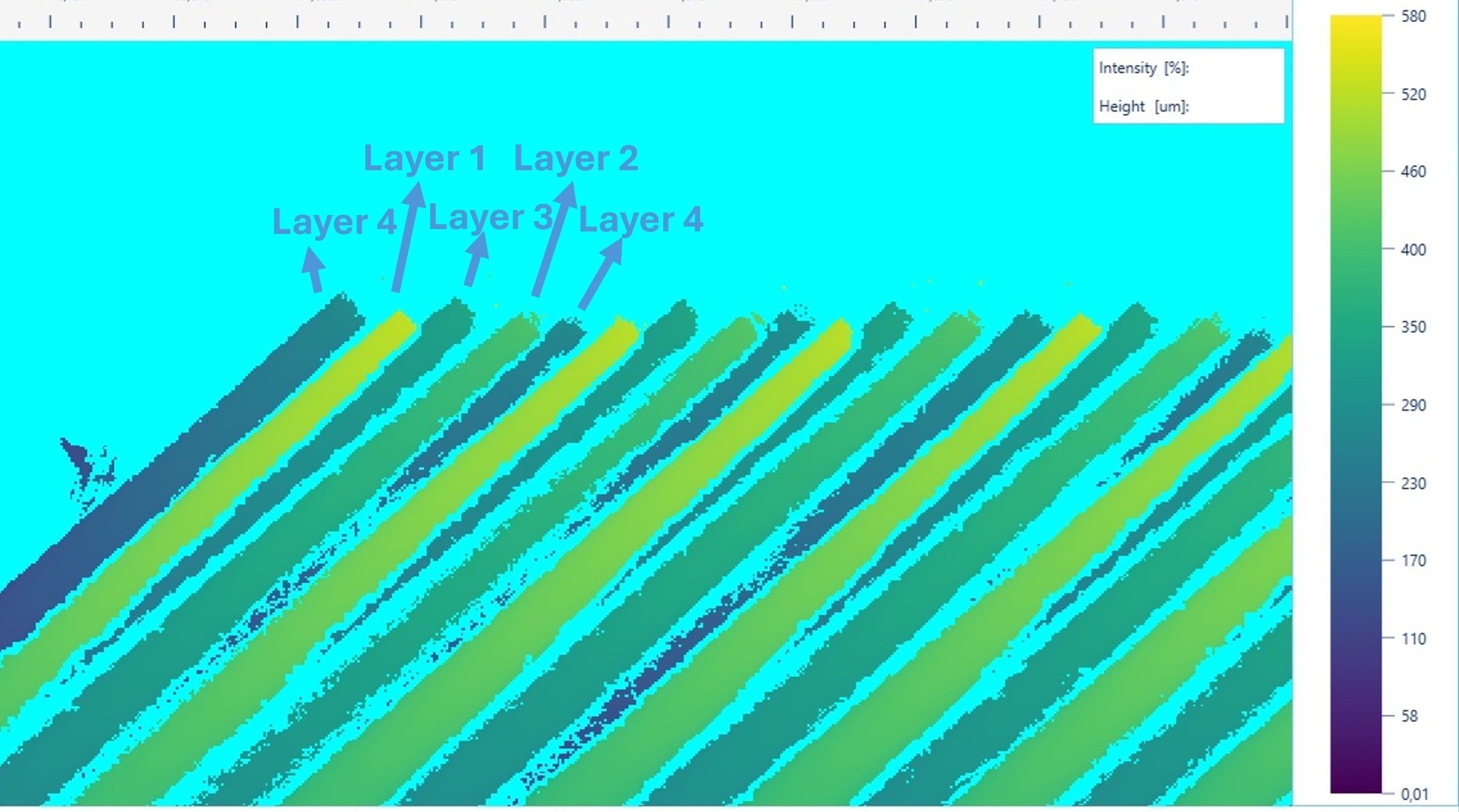
這是抓出「關鍵第一層」的技術核心。演算法會分析整體高度分佈直方圖,自動辨識出不同的高度群組(Clusters)。
• 分色渲染:系統自動將不同層級用不同顏色標示,讓使用者一眼就能區分哪一群是目標針尖,哪一群是背景結構。
 |
 |
黑白影像為 vision camera 實時影像,十字為匯入的 pin map
• 目標鎖定:
工程師可以設定僅鎖定「最先接觸層」(First Contact Layer)。系統會自動過濾掉非目標層級的結構與雜訊,即使有結構遮蔽或反射干擾,也能確保分析數據純淨且正確。
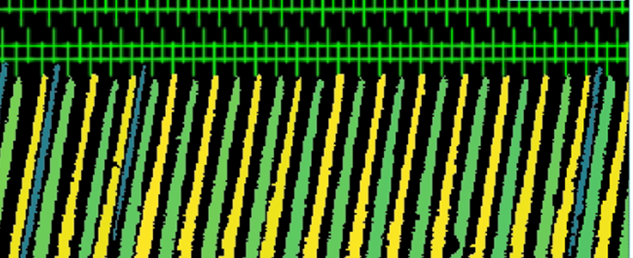
分層分色
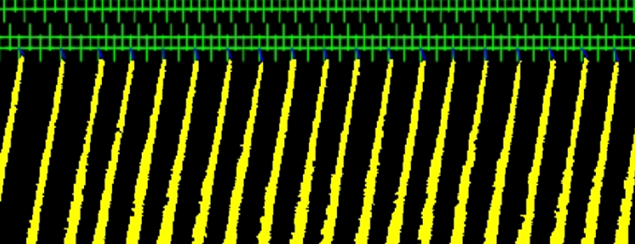
獨留第一層
四、從數據到決策:標準化的判讀邏輯
當資料被清洗並分層後,我們該如何解讀?工程文件建議建立一套標準化的「看圖邏輯」,讓跨部門溝通有據可依 :
• 全區概覽 (Global View):先看整體輪廓,確認是否有系統性的傾斜、翹曲或區域性偏移。
• 分層檢視 (Layer View):利用分層渲染,確認高度群組分佈是否符合設計預期。
• 目標過濾 (Filter Target):隱藏非關鍵層級,聚焦於目標層針尖的相對高度一致性。請記住,在高密度結構下,「相對高度差」往往比「絕對高度」更能反映接觸穩定度。
• 關聯驗證 (Traceability):透過軟體建立針尖與懸臂的配對連線,提供可追溯的驗證路徑,方便工程師在發現異常時快速回溯原因。
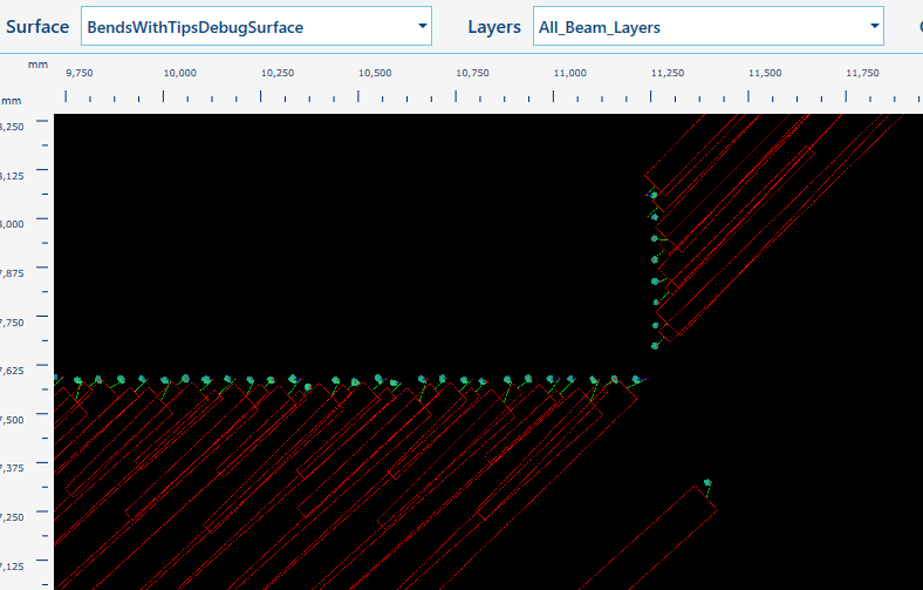
建立針尖與懸臂的連線配對
結語:將量測變成可複製的工程資產
高密度探針卡的量測挑戰,核心不在於硬體能不能掃到,而在於流程能不能被標準化。
從 Pin Map 的座標管理、高度特徵的精準對位,到演算法的自動分層分析,這套整合流程將量測從「依賴個人經驗的手藝」轉化為「可重複執行的科學程序」。這不僅解決了「量測什麼」的問題,更回答了「如何判讀」與「如何決策」,讓 3D 輪廓數據真正成為提升製程良率的強大武器。