Trimble X7 地面式光達與UAV整合應用—四四南村

利用地面式光達進行資料收集時,常常在戶外掃描結構物、樹林或地形等具有高低落差的目標物時,會難以獲得結構物的屋頂、樹冠層、或因地形高低起伏而被擋住的低地勢表面資料,在這樣的工作流程中,如果可以搭配無人飛行載具(UAV)的空拍資料,就能補足地面式光達所收集不到的點雲資料。利用UAV進行資料收集
近年來無人飛行載具(UAV)的發展日新月異,相較於有人飛機與衛星影像而言,不僅成本較低,並且操作容易、具有高空間解析度、較不受天氣影響等特色,種種優點也使其被廣泛應用在各種領域,如:環境或地形變化監測與測繪、紀錄片拍攝、運送貨物、監視系統等。
在與地面光達搭配的應用上,通常會利用航線規劃並拍攝多張影像的方式來進行,拍攝時須讓每張影像具有足夠的重疊率以利後續的影像拼接作業,再經由內業的後處理軟體運算,即可得到影像拼接的成果。現在的空拍影像後處理軟體,如:UASMaster、Pix4Dmapper等,都具有將影像資料產製出點雲的功能,就可以與地面光達所收集的點雲資料做整合。
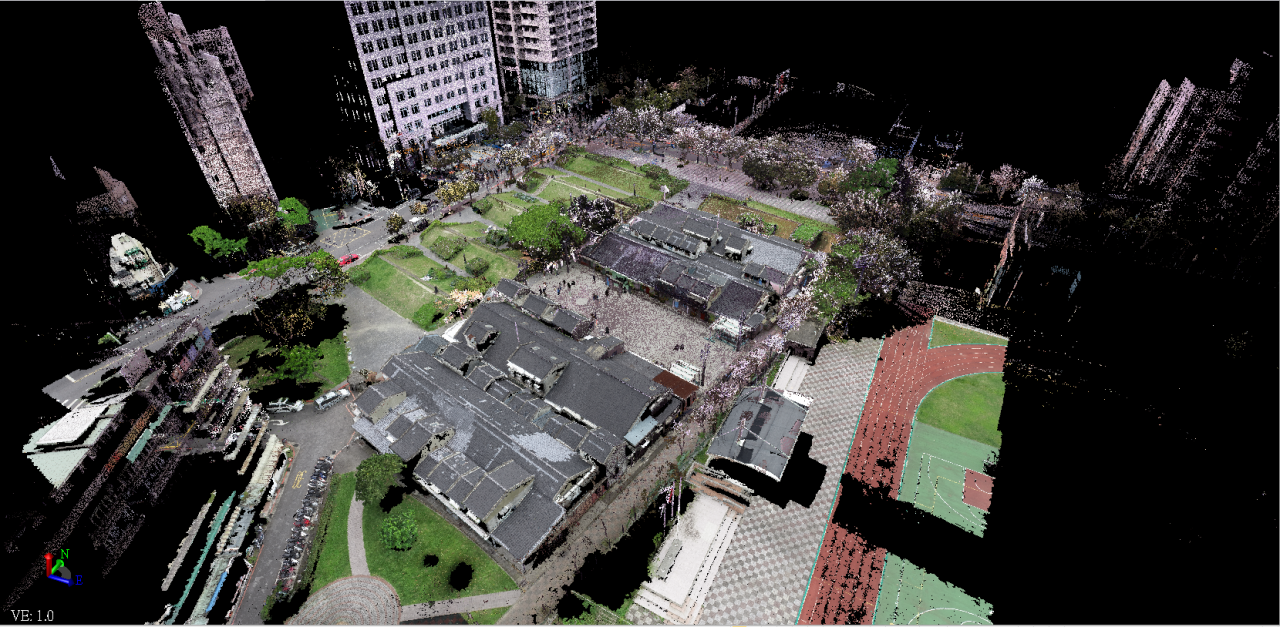
四四南村正射影像

外業工作流程:
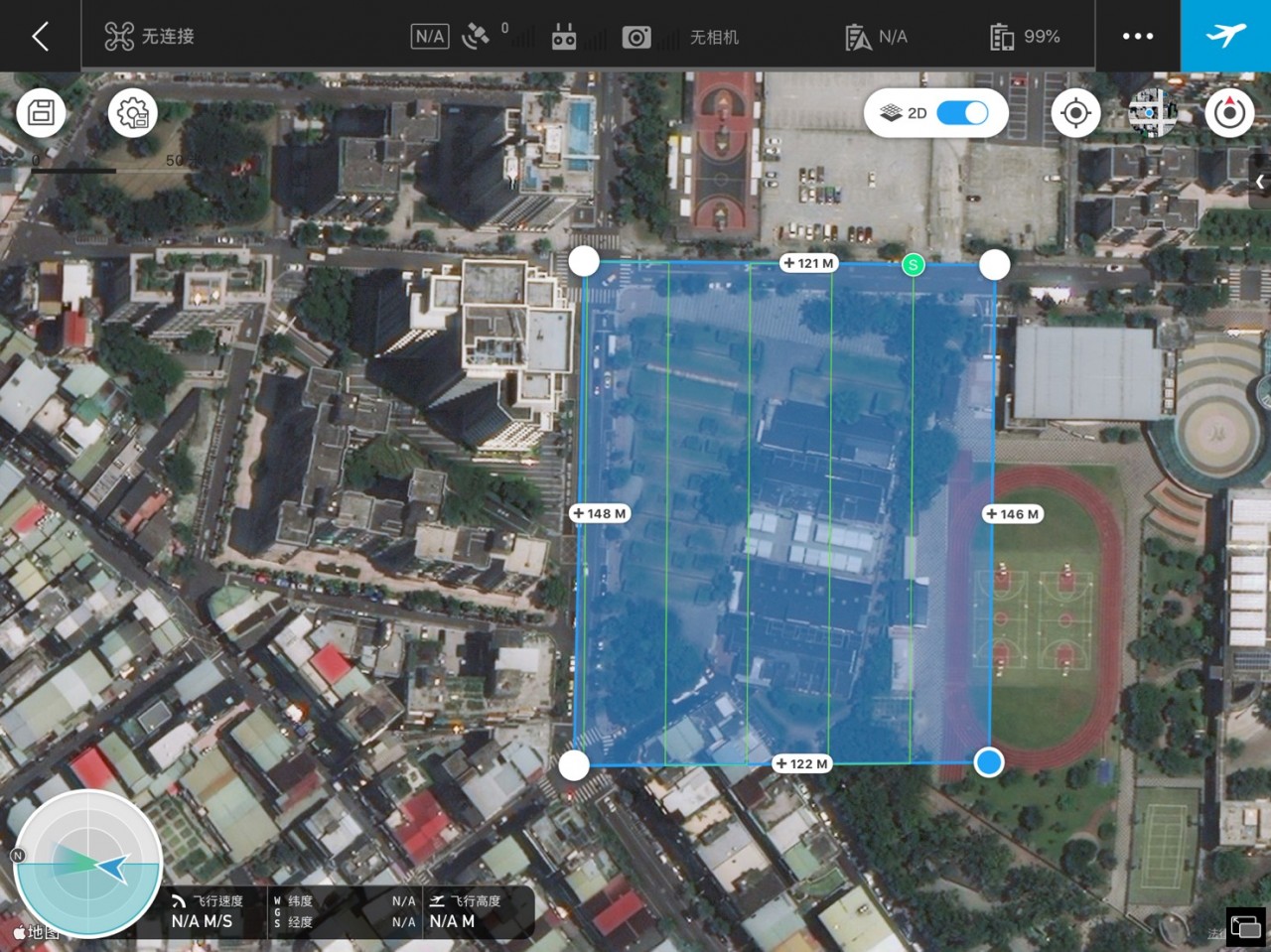
1.拍攝區域與航線規劃
2.控制點座標定位
可以讓影像資料具有絕對座標,降低影像拼接的誤差

此次控制點測量使用的是Trimble R8s LT GNSS接收儀。R8s LT具有三星系220個通道,VRS-RTK水平誤差8mm與垂直誤差15mm的高定位精度,再加上IP67的防護等級,讓使用者能在各種天氣環境獲得精準的定位資料。
UAV拍攝工作時間約25分鐘,7個點的控制點測量時間約15分鐘,65張相片內業後處理時間約90分鐘。
地面光達的點雲資料處理
就目前市面上的架站式掃描儀而言,一般的掃描儀都無法在外業將不同掃描站的資料進行拼接,需要利用內業的點雲後處理軟體(如:Trimble Business Center或 Trimble Realworks等),將各站的點雲資料進行拼接,拼接的方式有自動拚接或手動拼接兩種。
自動拚接
自動拚接具有作業快速的優點,但缺點是拼接誤差仰賴外業的站點挑選與現場環境特徵點多寡而決定,各站之間的點雲資料除了需要足夠的重疊率,也需要有足夠的共同特徵點以供軟體辨識,例如:在狹長的走廊或隧道、整片的空地、林地等環境特徵變化不大的地方進行掃描,非常容易儘管站與站之間點雲重疊率夠高,但無可辨認的共同特徵點而無法自動拚接,或拼接誤差較手動拼接大。
手動拼接
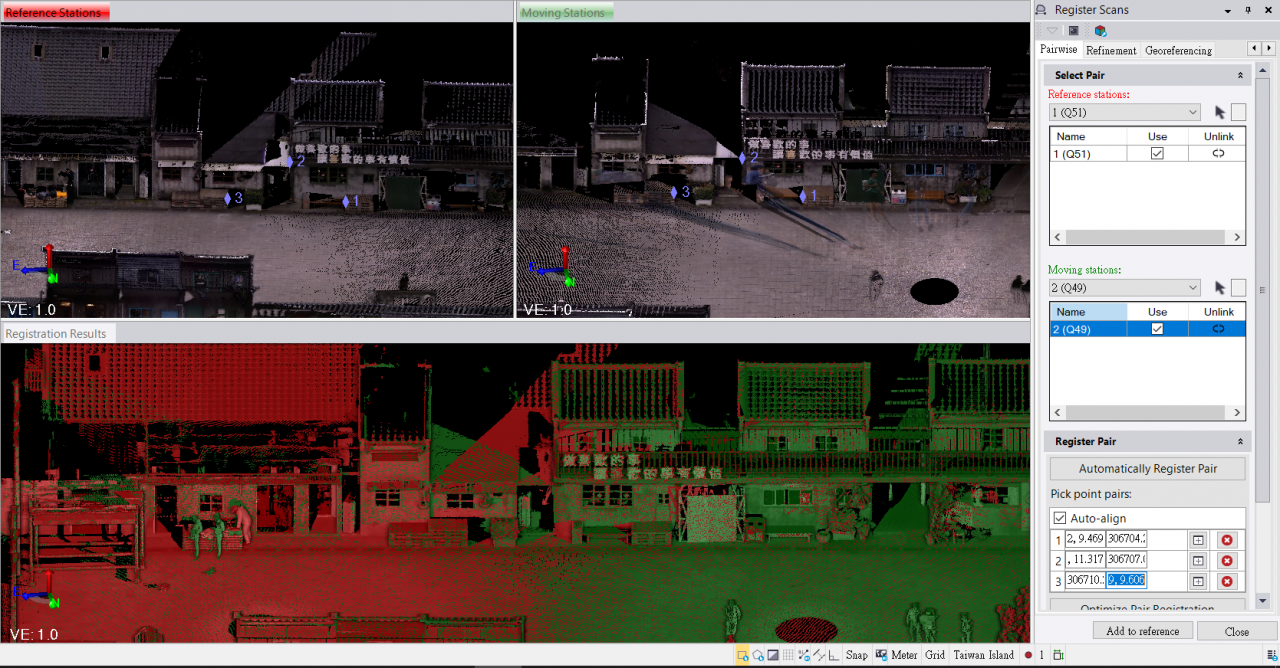
手動拼接則是內業人員利用人工辨識的方式,在軟體中標示不同站之間的三個以上共同特徵點。如下圖為利用Trimble Business Center的點雲編輯模組進行手動拼接畫面,左上區塊為基準站(紅色),右上區塊為待拚接的移動站(綠色),下方區塊則為利用顏色表示兩站的點雲資料相對位置,在標示兩站至少三個共同特徵點後,就可以將兩站的點雲資料拼接在一起。
內業工作時間:18站資料自動加手動拼接工作時間約3小時,拚接誤差6mm。
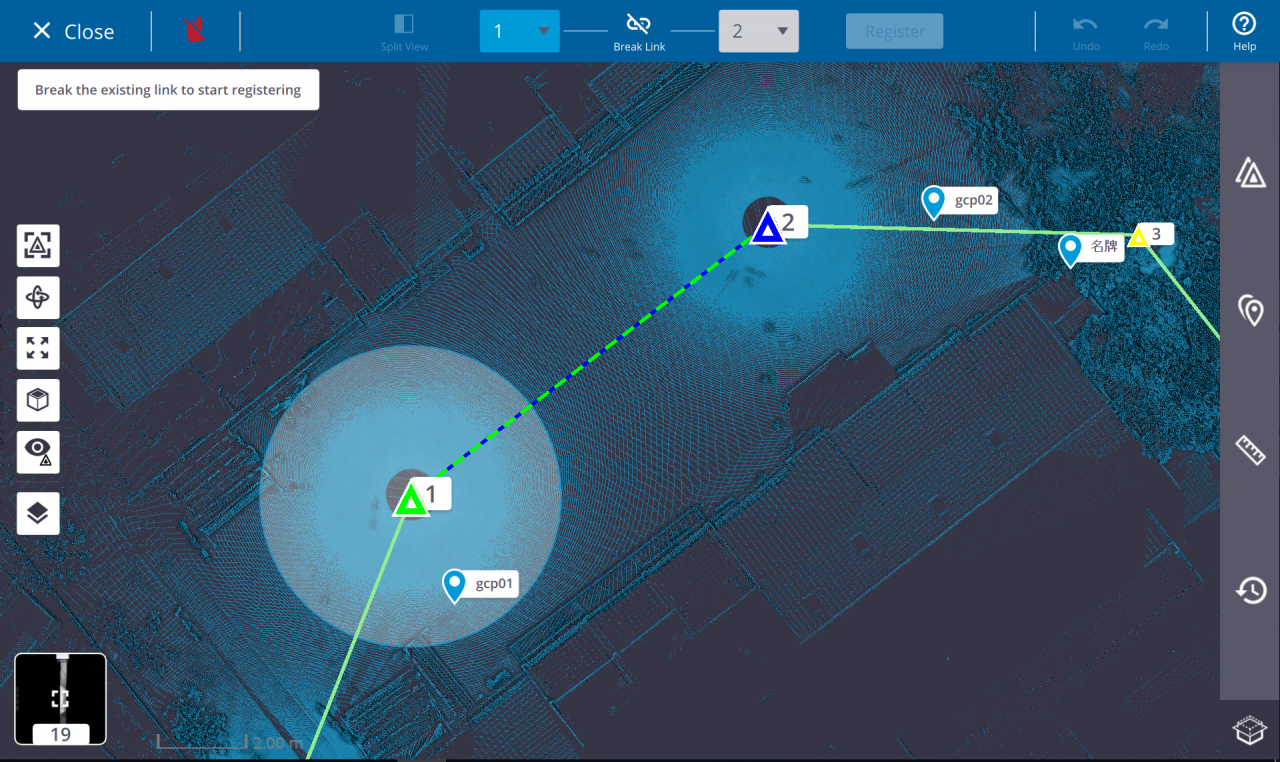
在Trimble Perspective外業軟體中手動拼接
然而,Trimble X7 3D掃描儀所搭配的外業軟體—Perspective,卻可以在外業現場進行點雲自動拼接,當每一站掃描完成後會自動與上一站或選擇的站位資料做拼接,當無法自動拚接時,除了可以手動拼接外,最重要的是可以現場檢查站位的點雲資料是否共同特徵點不足,可以在現場就進行資料補測,這樣能大量減少回到辦公室後進行點雲拼接時才發現點雲資料不足,而再次往返作業現場補測的時間與人力成本。
點選兩站點雲資料中的兩個共同特徵點
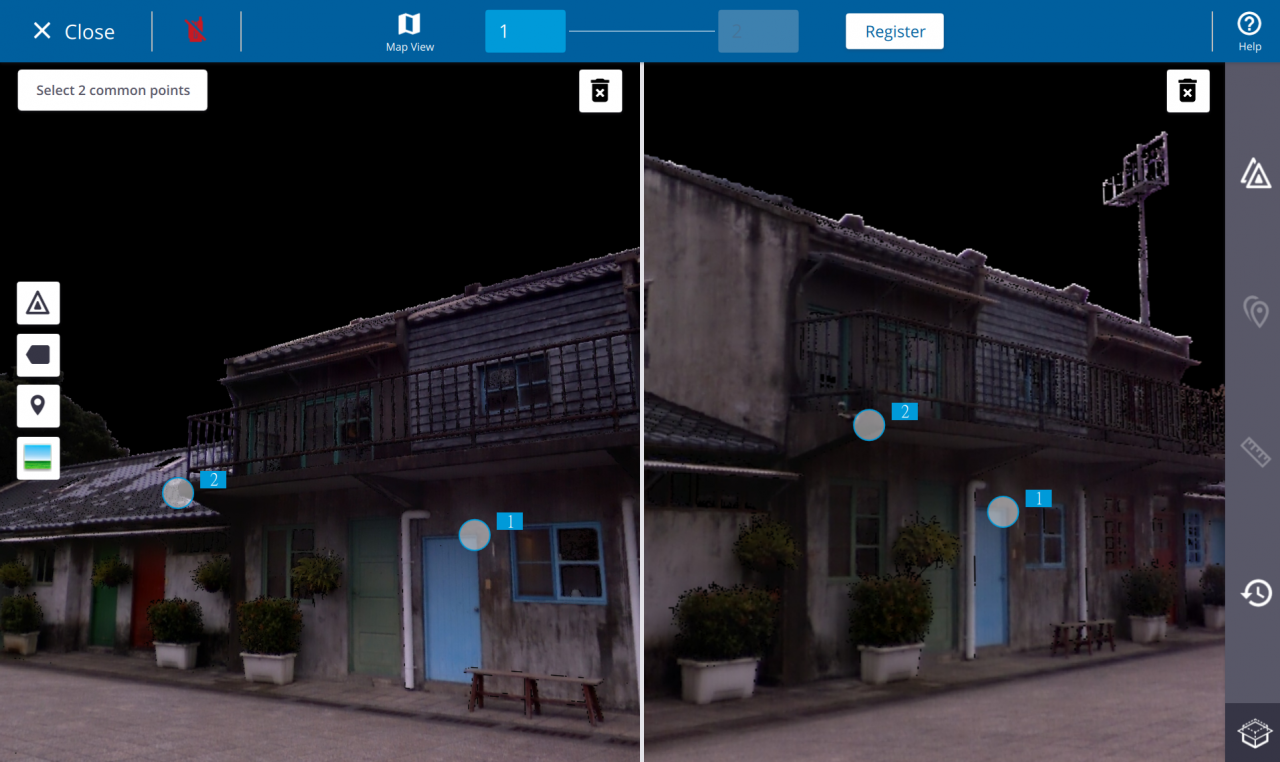
建立兩站點雲資料的連結,手動拼接完成
Trimble X7與UAV的點雲資料整合

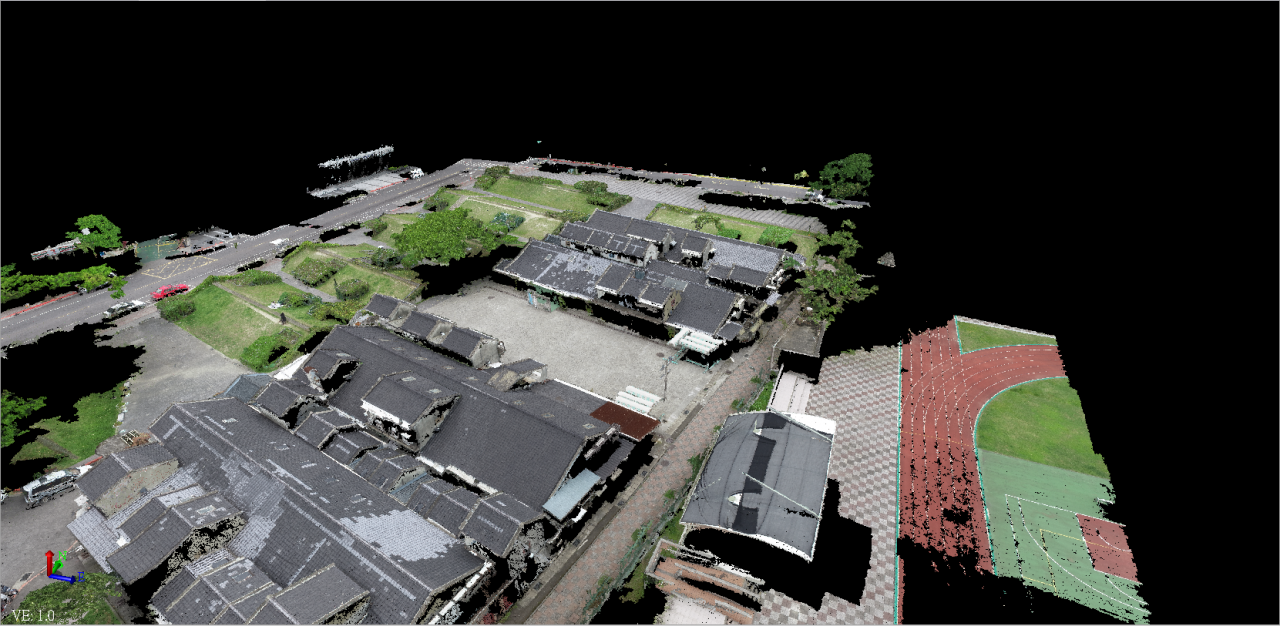
X7的點雲資料

UAV的點雲資料
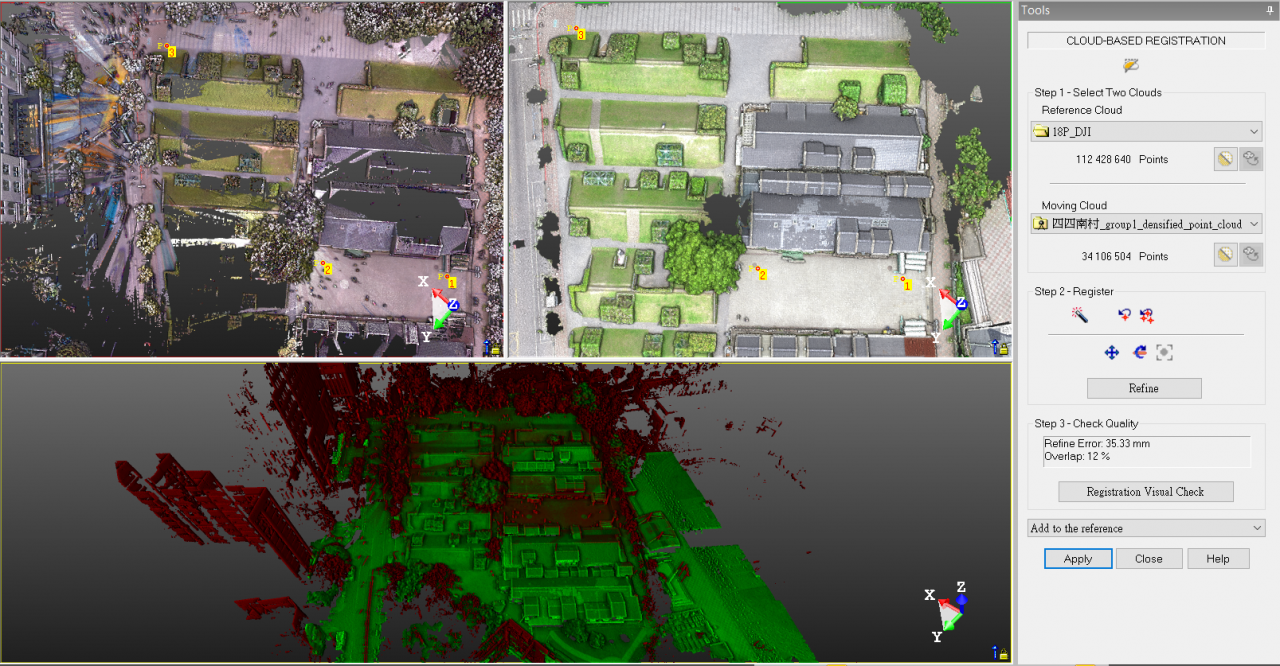
手動拼接
如上述所說,手動拼接是利用人工辨識的方式,標示不同點雲資料之間的三個以上共同特徵點。下圖為利用Trimble Realworks軟體進行手動拼接的畫面,畫面左上區塊為X7的點雲資料(紅色),右上區塊為UAV的點雲資料(綠色),下方區塊則為利用顏色表示兩站的點雲資料相對位置。
X7與UAV點雲資料拚接誤差約35mm,作業時間約30分鐘。
賦予點雲絕對座標
一般的架站式或手持式的地面型光達,其點雲的3維座標都是相對位置的虛擬座標,但如果可以將這些點雲資料賦予地理上的絕對座標,那也可以將不同筆的點雲資料進行拚接。在外業的工作流程與UAV差不多,可以在點雲資料涵蓋範圍內的地面特徵點上利用GPS進行座標資料收集,在內業的後處理軟體中再賦予這些點雲特徵點絕對座標。
由於空拍影像資料在處理時就已經將控制點座標賦予在照片上了,因此我們只需要賦予X7的點雲資料絕對座標資訊,再將UAV拍攝的照片所產製的的點雲資料導入就完成拼接了。下面為Trimble Business Center的操作介面。X7與UAV點雲資料拚接誤差約30mm,作業時間約30分鐘。
工作流程:
導入控制點

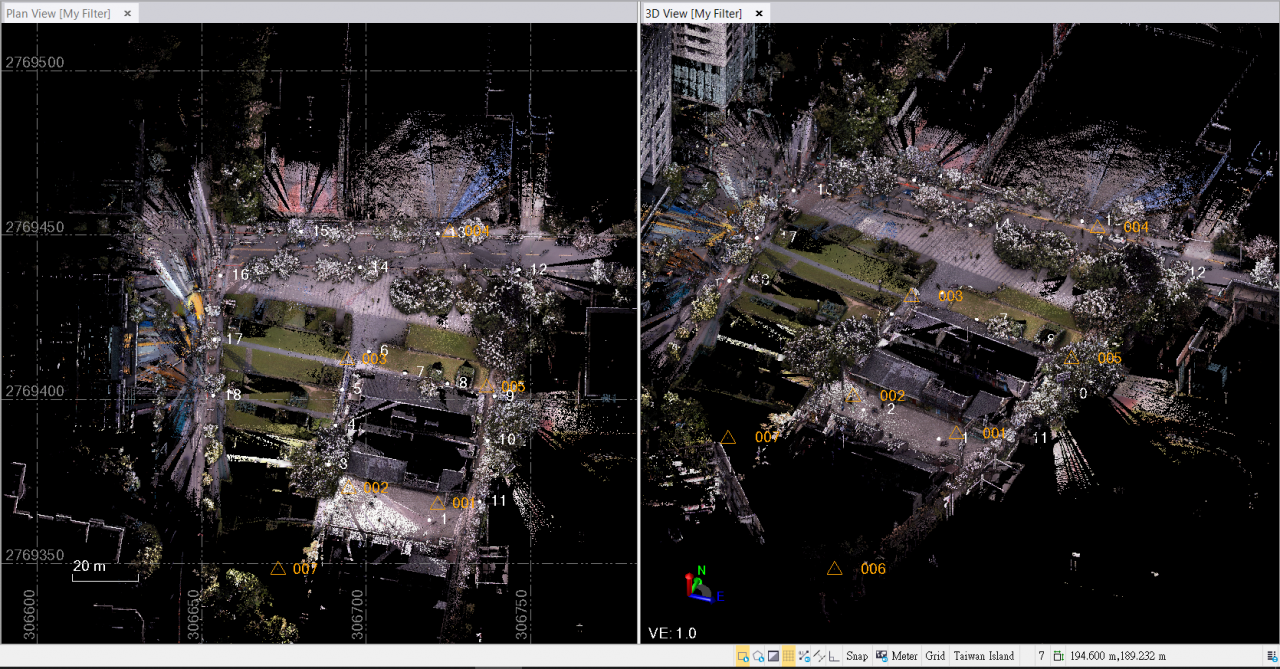
導入X7點雲資料。左區塊為平面視角,右區塊為3D視角。
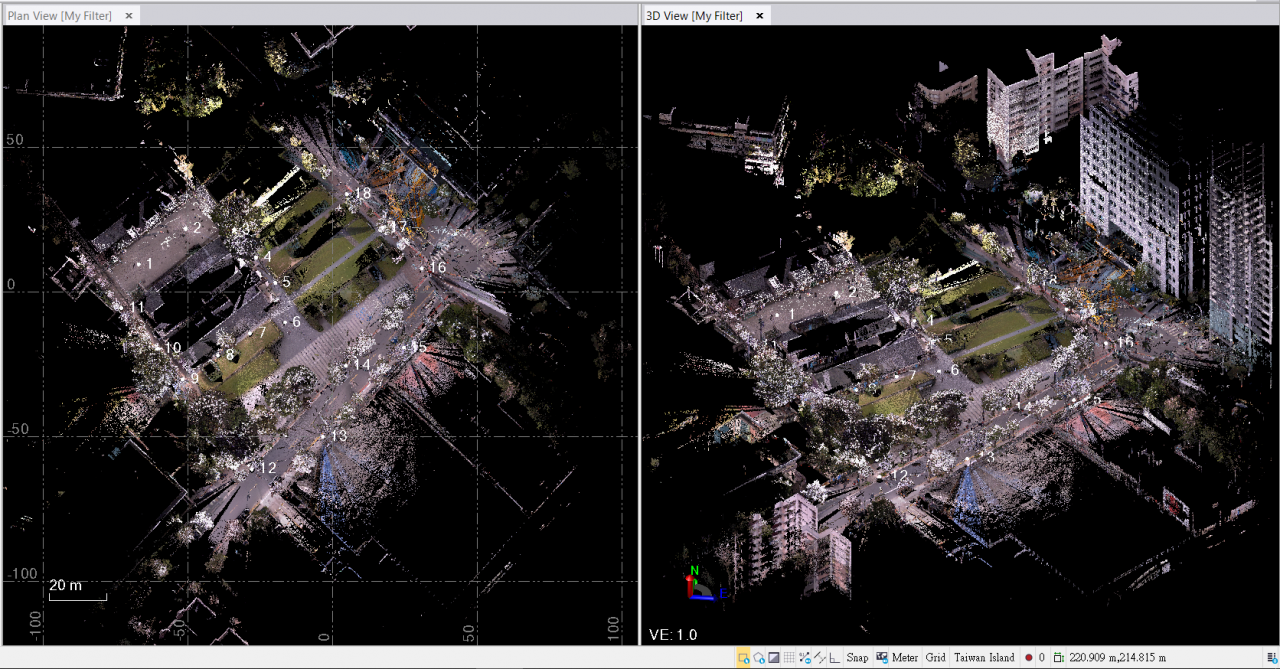
將控制點座標標示在點雲上
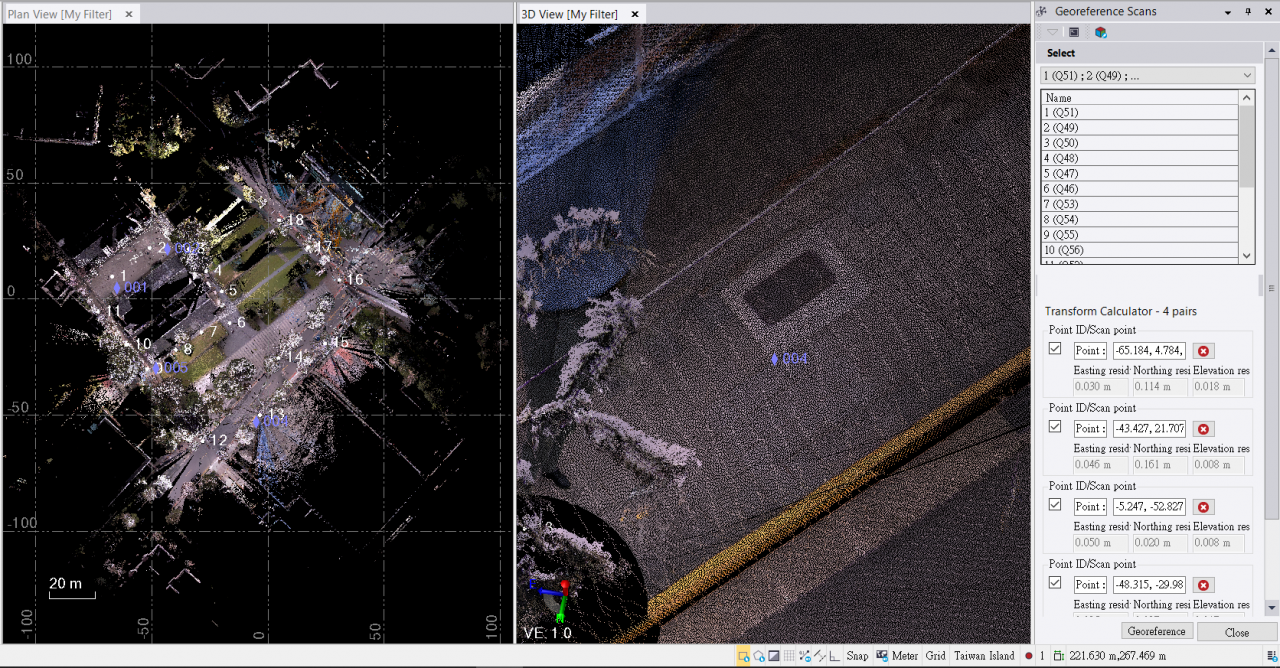
點雲資料移動到絕對座標上
導入UAV點雲資料,即與X7資料疊合
工作流程與時間:
-外業工作時間:
Trimble X7外業現場掃描:2小時
UAV空拍作業:25分鐘
控制點測量:10分鐘
-內業工作時間:
UAV影像後處理:90分鐘
X7點雲資料拼接:3小時。如果架站資料可於外業自動拚接,即可省去此三小時。
X7與UAV點雲資料疊合:30分鐘
-內外業工作時間總和:
一般架站式掃描儀:7小時35分鐘(可能有重返現場補測資料的風險!)
X7掃描儀:4小時35分鐘
-關於Trimble X7的功能介紹可以參考:
Trimble X7 古蹟掃描應用—四四南村
Trimble X7雷射掃描儀
Trimble X7 雷射掃描儀應用介紹